The linear transformations of the Euclidean plane are the invertible linear applications, i.e. of non-zero determinant. They allow us to move from one basis of the plane to another, and the orthogonal transformations, i.e. the vectorial isometries, exchange the orthonormal bases.
1. The linear transformations of the plane
1.1. Linear applications from the plane into itself
In dealing with vector rotations of the plane, we introduced the linear applications from \(\mathbb R^2\) into \(\mathbb R^2\). These are the functions \(f:\mathbb R^2\to \mathbb R^2\), which “preserve addition and multiplication by a constant on each coordinate”, i.e. for which, if \((x,y),(u,v)\in\mathbb R^2\) are two vectors of the plane and \(a,b\in\mathbb R^2\) are two real numbers, we have \[f(a. (x,y)+b.(u,v))=a.f(x,y)+b.f(u,v).\] Among these applications, we find all the homotheties, rotations and vector symmetries. Such an application always has the form \(f(x,y)=(ax+by,cx+dy)\), for real numbers \(a,b,c,d\) determined uniquely.
1.2. Analytical description of the linear applications of the plane
Let us prove it: if we note \(f(1,0)=(a,c)\) and \(f(0,1)=(b,d)\), for any vector \((x,y)\in\mathbb R^2\) we have, by linearity, \(f(x,y)=f(x. (1,0)+y.(0,1))=x.f(1,0)+y.f(0,1)\) \(=(ax,cx)+(by,dy)=(ax+by,cx+dy)\). Thus, the values taken by a linear application \(f\) of the plane are entirely determined by the values of \(f\) on the vectors \(\vec i=(1,0)\) and \(\vec j=(0,1)\) of the canonical basis. Moreover, this representation is unique, in the sense that the coefficients \(a,b,c,d\) are uniquely determined by \(f\) itself. Indeed, if we suppose that \(a’,b’,c’,d’\in\mathbb R\) and that \(f\) is described by \(f(x,y)=(a’x+b’y,c’x+d’y)\) for all \((x, y)\in\mathbb R^2\), in particular we have \(f(1,0)=(a’,c’)\) and \(f(0,1)=(b’,d’)\), whence \(a=a’,b=b’,c=c’\) and \(d=d’\). Now, the possibility of this description is essentially linked to the notion of basis of the Euclidean plane, and one can interpret, as we shall see, the “change” from one basis to another in terms of linear transformations, i.e. bijective linear applications.
1.3. A non-zero determinant characterises bijective linear applications
To prepare this interpretation, let us (re)introduce the notion of determinant of the linear application \(f:(x,y)\in\mathbb R^2\mapsto (ax+by,cx+dy)\), evoked with the vector rotations of the plane (ibid.): it is the quantity \(ad-bc\) isolated in the characterisation of the bases of the Euclidean plane. Its essential importance here lies in the fact that the application \(f\) is bijective if and only if its determinant is not zero. To show this, let us describe \(f\) from the vectors \(\vec u=(a,c)\) and \(\vec v=(b,d)\): for \((\alpha,\beta)\in\mathbb R^2\), we have \(f(\alpha,\beta)=(a. \alpha+b.\beta,c.\alpha+d.\beta)=\alpha.\vec u+\beta.\vec v\). Then, if \(ad-bc\neq 0\) and \(\vec w\in\mathbb R^2\), we have \(ad-cb=ad-bc\neq 0\) also and \(\vec u\) and \(\vec v\) are non-zero and non-collinear. There exists therefore a unique pair \((\alpha,\beta)\in\mathbb R^2\) of real numbers such that \(\vec w=f(\alpha,\beta)=\alpha.\vec u+\beta.\vec v\), so that \(f\) is bijective. Conversely, if \(f\) is bijective, for any \(\vec w\in\mathbb R^2\) there exists a unique pair \((\alpha,\beta)\in\mathbb R^2\) such that \(\vec w=f(\alpha,\beta)= \alpha.\vec u+\beta.\vec v\) : \(\vec u\) and \(\vec v\) are not collinear, therefore \(ad-bc=ad-cb\neq 0\).
2. Change of basis and linear transformations
2.1. The bases of the plane correspond to linear bijections
Let us take again the point of view of the bases of the plane. A pair of vectors \((\vec u=(a,c),\vec v=(b,d))\) then implicitly defines the linear application \(f:(x,y)\in\mathbb R^2\mapsto (ax+by,cx+dy)\). From the previous paragraph, we can now say that the pair \((\vec u,\vec v)\) is a basis of the plane if and only if the associated application \(f\) is bijective. There is thus an essential relation between the linear transformations of the plane and the bases of the plane, captured by the determinant \(ad-bc\) of the application \(f\). Now, since the canonical basis \((\vec i,\vec j)\) is the one in which the coordinates of \(\vec w=(x,y)\) are precisely \(x\) and \(y\), this means that when \(\vec u,\vec v)\) is a basis, the linear bijection \(f\) describes in a way the change from the canonical basis to the basis \((\vec u,\vec v)\).
2.2. Linear isomorphisms transform the coordinates
To give a precise meaning to this idea, let us change again our point of view. When \((\vec u,\vec v)\) is a basis, the application \(f\) is bijective thus for any vector \(\vec w=(x,y)\in\mathbb R^2\) there exists a unique pair \((\alpha,\beta)\in\mathbb R^2\) such that \(\vec w=\alpha.\vec u+\beta.\vec v\). From this point of view, the numbers \(\alpha\) and \(\beta\) are in fact the coordinates of the same vector \(\vec w\) in the new basis \((\vec u,\vec v)\). In other words, a bijective linear application associated with a base \(B=(\vec u,\vec v)\) serves to transform the coordinates of a vector in the canonical basis into the coordinates of this same vector in basis \(B\). In fact, by definition, the new coordinates \((\alpha,\beta)\) of the vector in the new basis are precisely given by the reciprocal bijection of \(f\), i.e. \((\alpha,\beta)=f^{-1}(x,y)\).
2.3. Changing from any basis to another
This interpretation of a linear transformation \(f\) associated with a basis \(B=(\vec u,\vec v)\) as a “change” from the canonical basis to basis \(B\) can be generalised to any two bases. If \(B’=(\vec{u’},\vec{v’})\) is another basis, and if we note \(C=(\vec i,\vec j)\) the canonical basis, let us call \(f:(x,y)\mapsto (ax+by,cx+dy)\) the transformation associated with \(B\) and \(f’: (x,y)\mapsto (a’x+b’y,c’x+d’y)\) the transformation associated with \(B’\), so that \(\vec{u’}=(a’,c’)\) and \(\vec{v’}=(b’,d’)\). The linear transformation allowing us to change from basis \(B\) to basis \(B’\) is then the composite application \(f\circ f^{-1}\): we first “change” from \(B\) to \(C\) (in the reverse order of the change from \(C\) to \(B\)), then we change from \(C\) to \(B’\). To describe this transformation explicitly, let us describe the reciprocal bijection \(f^{-1}\): we must solve the system $$\left\lbrace\begin{array}{ccc} x’ & = & ax + by\\y’ & = & cx + dy\end{array}\right.$$ with respect to \(x\) and in \(y\). By noting \(\Delta=ad-bc\) the determinant of \(f\), we obtain \(f^{-1}(x’,y’)=(\frac{1}{\Delta}(dx’-by’),\frac{1}{\Delta}(ay’-cx’))\). Thus the linear transformation associated with the change from basis \(B\) to basis \(B’\) is \[f’\circ f^{-1}:(x,y)\in\mathbb R^2\mapsto \frac{1}{\Delta}(a’dx-a’by+b’ay-b’cx,c’dx-c’dy+d’cy-d’cx).\]
2.4. Linear transformation of a basis of the plane
Conversely, if from basis \(B=(\vec u,\vec v)\) we give ourselves a linear bijection of the plane \(g: (x,y)\mapsto (\alpha x+\beta y,\gamma x+\delta y)\), let us consider the vectors \(\vec{u’}=g(\vec u)=(\alpha a+\beta c\) \and \(\vec{v’}=g(\vec v)=(\alpha b+\beta d, \gamma b+\delta d)\). Let us note as before \(\vec{u’}=(a’,c’)\) and \(\vec{v’}=(b’,d’)\) : we then define a linear application
\begin{eqnarray} f’:(x,y) & \mapsto & (a’x+b’y,c’x+d’y)\\ & = & ((\alpha a+\beta c)x+(\gamma a+\delta c)y,(\alpha b+\beta d)x+(\gamma b+\delta d)y)\\ & = & (a(\alpha x+\gamma y)+c(\beta x+\delta y),b(\alpha x+\gamma y)+d(\beta x+\delta y)).\end{eqnarray}
In other words, if we define a new linear application \(\widetilde g: (x,y)\mapsto (\alpha x+\gamma y,\beta x+\delta y)\), \(\widetilde g\) is a bijection since \(\alpha\delta-\gamma\beta=\alpha\delta-\beta\gamma\neq 0\), and \(f’=f\circ \widetilde g\) is a bijection also, so that the pair \((\vec{u’},\vec{v’})\) is a basis of the plane by the first paragraph of the section. Thus, a linear transformation transforms a basis of the plane into another basis of the plane.
3. Orthogonal transformations and orthonormal bases
3.1. Reminder on vector isometries and orthonormal bases
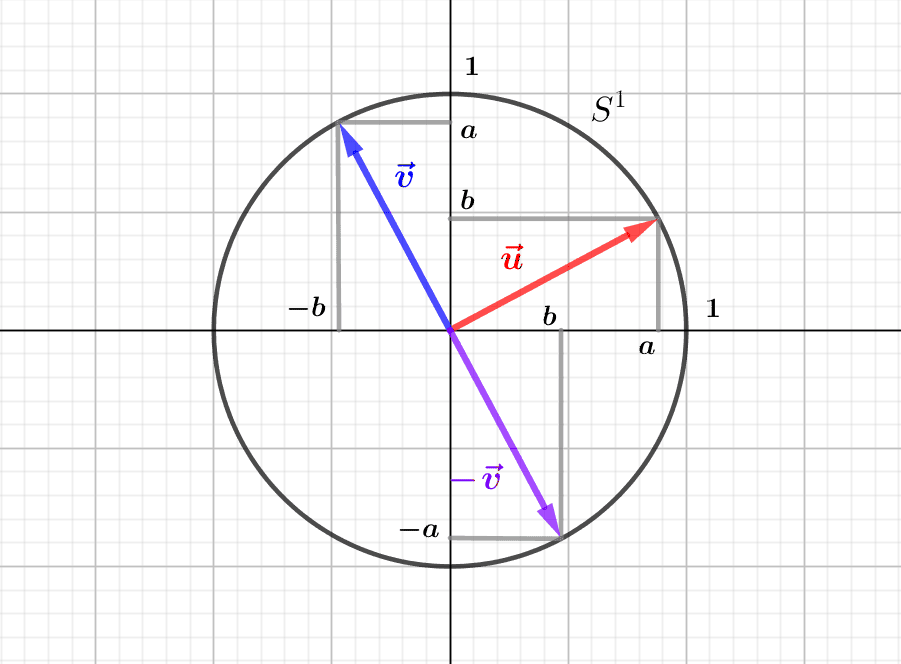
When dealing with vector rotations of the plane, we distinguished, among the transformations of the Euclidean plane, the vector isometries, which can also be called orthogonal transformations, which are those which “preserve” the scalar product or the Euclidean norm. They are the linear transformations \(f: (x,y)\in\mathbb R^2\mapsto (ax+by,cx+dy)\) such that for all \((x,y)\in\mathbb R\), we have \((ax+by)^2+(cx+dy)^2=x^2+y^2\), or which determinant \(ad-bc\) is \(1\) (vector rotations) or \(-1\) (vector symmetries). In dealing with the bases of the Euclidean plane, we also introduced the orthonormal bases, i.e. the pairs of non-zero vectors \((\vec u=(a,b),\vec v=(c,d))\) which are both orthogonal (i.e. such that \(\vec u. \vec v=ac+bd=0\)) and unitary (i.e. of norm \(1\), or else such that \(a^2+b^2=c^2+d^2=1\)). Let us recall that such a basis is said to be direct if the angle between \(\vec u\) and \(\vec v\) is \(\pi/2\) (case where \(\vec v=(-b,a)\)), indirect if this angle is \(-\pi/2\) (case where \(v=(b,-a)\)).
3.2. Orthogonal transformations exchange the orthonormal bases
While the bases of the plane are related by the linear transformations, the orthonormal bases of the plane are related by the orthogonal transformations. Using the vocabulary from the previous paragraphs, if \(B=(\vec u,\vec v)) is an orthonormal basis and \(f:(x,y)\mapsto (ax+by,cx+dy)\) is an orthogonal transformation, then \(B’=(f(\vec u,f(\vec v))\) is an orthonormal basis. In the same way, if \(B\) and \(B’\) are two orthonormal bases, the linear transformation \(f\) associated with the change from \(B\) to \(B’\) is an orthogonal transformation. We can be more precise: let us say that two orthonormal bases \(B\) and \(B’\) have the same orientation if they are both direct or both indirect, a different orientation in the other cases. So a vector rotation transforms an orthonormal basis into an orthonormal basis with the same orientation, while a vector symmetry transforms an orthonormal basis into an orthonormal basis with a different orientation.
0 Comments